Computer Science/Optimization
2. Optimality Conditions, Convexity, Newton’s Method for Equations
- -
728x90
반응형
Optimality Conditions: Preliminaries
- Local minima and maxima have one thing in common
First-order Necessary Condition
From now on is differentiable and that its first and second derivatives are continuous for every where is a domain of
If is a local minimum, then
- Not a sufficient condition, since it could be a
saddle point
Second-order Conditions
If is a local minimum, then is positive semi-definite
Proof
But you should note that even though and , we can’t be sure that must be a local minimum.

Think about,
That means there is no sufficient and necessary condition in general
💡
First-order Condition과 Second-order Condition은 local minimum이면 만족하지만 그것을 만족한다고 해서 local minimum이라고 확신할 수 없다는 것이다.
Second-order sufficient condition
It is sufficient to guarantee that is a local minimizer. If
then is a strict local minimizer of .
Proof
Since
where
Since is continuous, such that
Take
💡Note that Moreover, since is positive definite,
💡1) bi-linearity of inner-product2) Cauchy-schwarz inequality
3) defi
4) Associativity of multiplication in
Therefore,
This means that is also positive definite. So, is a local minimum.
💡Since has a restriction on its domain, wecan notguarantee that is a global minimum.
Convexity

- A set is
convexif any and ,
- A function is
convexon a convex set if for any and ,
- A minimization problem is
convexif is convex and is convex
Implication of Convexity
For a convex optimization problem, a local optimum is also a global optimum

If the feasible region is convex, it implies that all the points along the line segment between the current solution and the new feasible solution are also feasible.
Therefore, any smaller step size will still allow us to move along the same direction from the current solution, while remaining within the feasible region. This is because the convexity property guarantees that the entire line segment between the current solution and the new feasible solution lies within the feasible region.
This property is valuable in optimization algorithms, as it ensures that if we have found a feasible solution, we can always refine it further by taking smaller steps while maintaining feasibility. It provides flexibility in adjusting the step size and allows for a more precise exploration of the feasible region.
How to recognize convexity?
- One dimension case : A function is convex if and only if for all where is a domain of
- Multiple dimension case
- is convex if and only if Hessian for all where is a domain of
- If is positive definite for all (i.e. , then is strictly convex
→ Note that it is not true for opposite direction
- is convex if and only if it is above the tangent

💡
With constraints, we care more about function’s convexity over the feasible set; the above remains applicable but may require minor rephrasing
Convexity and Optimality Condition
Actually if is convex, local optimum and global optimum is equivalent. In addition,
💡
Second-order Condition is already satisfy if is convex
Newton’s Method for Nonlinear Equations
- A sequence of points as approximate solutions
- The sequence converges if it approaches a solution of the equation
Especially for one dimension,
This means that
Therefore,
- This is the
Newton-Raphsonmethod
 Newton's methodIn numerical analysis, Newton's method, also known as the Newton–Raphson method, named after Isaac Newton and Joseph Raphson, is a root-finding algorithm which produces successively better approximations to the roots (or zeroes) of a real-valued function. The most basic version starts with a real-valued function f, its derivative f′, and an initial guess x0 for a root of f. If f satisfies certain assumptions and the initial guess is close, then
Newton's methodIn numerical analysis, Newton's method, also known as the Newton–Raphson method, named after Isaac Newton and Joseph Raphson, is a root-finding algorithm which produces successively better approximations to the roots (or zeroes) of a real-valued function. The most basic version starts with a real-valued function f, its derivative f′, and an initial guess x0 for a root of f. If f satisfies certain assumptions and the initial guess is close, then https://en.wikipedia.org/wiki/Newton's_method
https://en.wikipedia.org/wiki/Newton's_method - This is the
- A related derivative-free method is the
secant method 💡It can be viewed as approximate of the derivative by using average rate of change.Secant methodIn numerical analysis, the secant method is a root-finding algorithm that uses a succession of roots of secant lines to better approximate a root of a function f. The secant method can be thought of as a finite-difference approximation of Newton's method. However, the secant method predates Newton's method by over 3000 years.https://en.wikipedia.org/wiki/Secant_method
💡It can be viewed as approximate of the derivative by using average rate of change.Secant methodIn numerical analysis, the secant method is a root-finding algorithm that uses a succession of roots of secant lines to better approximate a root of a function f. The secant method can be thought of as a finite-difference approximation of Newton's method. However, the secant method predates Newton's method by over 3000 years.https://en.wikipedia.org/wiki/Secant_method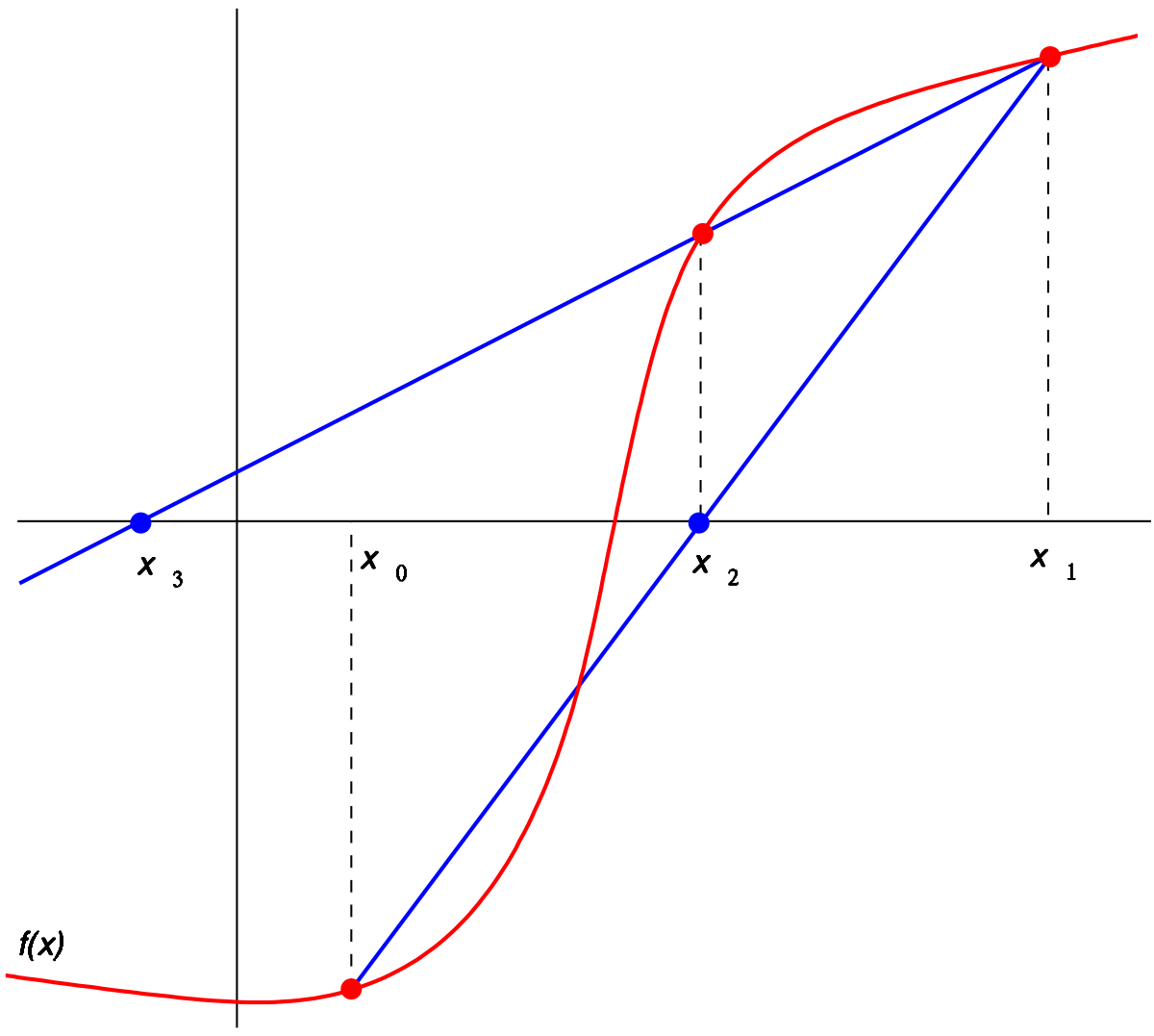
- Convergent or not: depends on the
functionand theinitial point
Newton’s Method: Multiple Dimensions
Let
That means
if is invertible
Therefore,
💡
If is not invertible, this method can’t be applicable.
💡
If we interpret as a , it is just a generalization of the newton’s method in 1-dimensional case.
반응형
Contents
소중한 공감 감사합니다