Therefore V is closed under vector addition and scalar multiplication.
Thus, the affine set C can be expressed as
C=V+x0:={v+x0∣v∈V}
The set of all affine combinations of points in some set C⊂Rn is called the affine hull of C, and denoted aff C
aff C={θ1x1+⋯+θkxk∣x1,…,xk∈C,θ1+⋯+θk=1}
💡
The affine hull is the smallest affine set that contains C
Affine dimension and relative interior
We define the dimension of an affine set C as the dimension of the subspace V. But it is not always consistent with other definitions of dimension.
Let’s think about the unit circle in R2. Its affine dimension is two. By most definitions of dimension, however, the unit circle in R2 has dimension one.
We define the relative interior of the set C, denoted relint C, as its interior relative to aff C
relint C={x∈C∣∃r,Br(x)∩aff C⊂C}
💡
Topologically, we only consider a open set relative to C
Convex set
line segment : all points betweenx1 and x2
x=θx1+(1−θ)x2
where 0≤θ≤1
convex set : contains line segment between any two points in the set
∀x1,x2∈C,θx1+(1−θ)x2∈C
where 0≤θ≤1
💡
Note that affine set is not a convex set
List of convex set
convex hull
convex cone/ norm cone
half-space
euclidean ball / norm ball
ellipsoid
polyhedra
simplex
Convex combination and convex hull
convex combination : any point x of the form
x=θ1x1+⋯+θkxk
where θ1+⋯+θk=1,θi≥0
💡
Generalization of the convex set
convex hull : set of all convex combinations
The convex hull of a set C, denoted convC, is the set of all convex combinations of points in C
To describe the simplex as a polyhedron, we proceed as follows.
By definition, x∈C iff x=θ0v0+⋯+θkvk for some θ⪰0 with 1Tθ=1. Define y=(θ1,…,θk) and
B=[v1−v0⋯vk−v0]∈Rn×k
we can say that x∈C iff
x=v0+By
💡
It is just a matrix representation of x
Since the columns in B are linearly independent, the rank of B is k. Therefore, there exists a nonsingular matrix A=[A1A2]∈Rn×n such that
AB=[A1A2]B=[I0]
💡
In mathematical perspective, we can view A as a transition matrix that we use in Gauss elimination process.
Therefore,
Ax=Av0+ABy⇒A1x=A1v0+y,A2x=A2v0
From this we can see that x∈C if and only if
A2x=A2v0y=A1x−A1v+0y⪰01Ty≤1
In other words, we have x∈C iff
A2x=A2v0,A1x⪰A1v0,1TA1x≤1+1TA1v0
which is a set of linear equalities and inequalities in x. Therefore, we can express a simplex as a polyhedron.
💡
Re-check the definition of simplex, it is a function with respect to θ not x. By using above reformulation, we can expressed the simplex as a function of x.
Positive semidefinite cone
We use the notation Sn to denote the set of symmetric n×n matrices
Sn={X∈Rn×n∣X=XT}
Note that Sn is a convex set.
Proof
Let X,Y∈Sn,θ≥0
θX+(1−θ)Y is also symmetric.
So, θX+(1−θ)Y∈Sn
Therefore, Sn is a convex set.
We use the notation S+n to denote the set of symmetric positive semi-definite matrices
Since θx1+(1−θ)x2∈S1,θy1+(1−θ)y2∈S2, θz1+(1−θ)z2∈S1×S2.
Therefore, S1×S2 is a convex set.
Perspective function
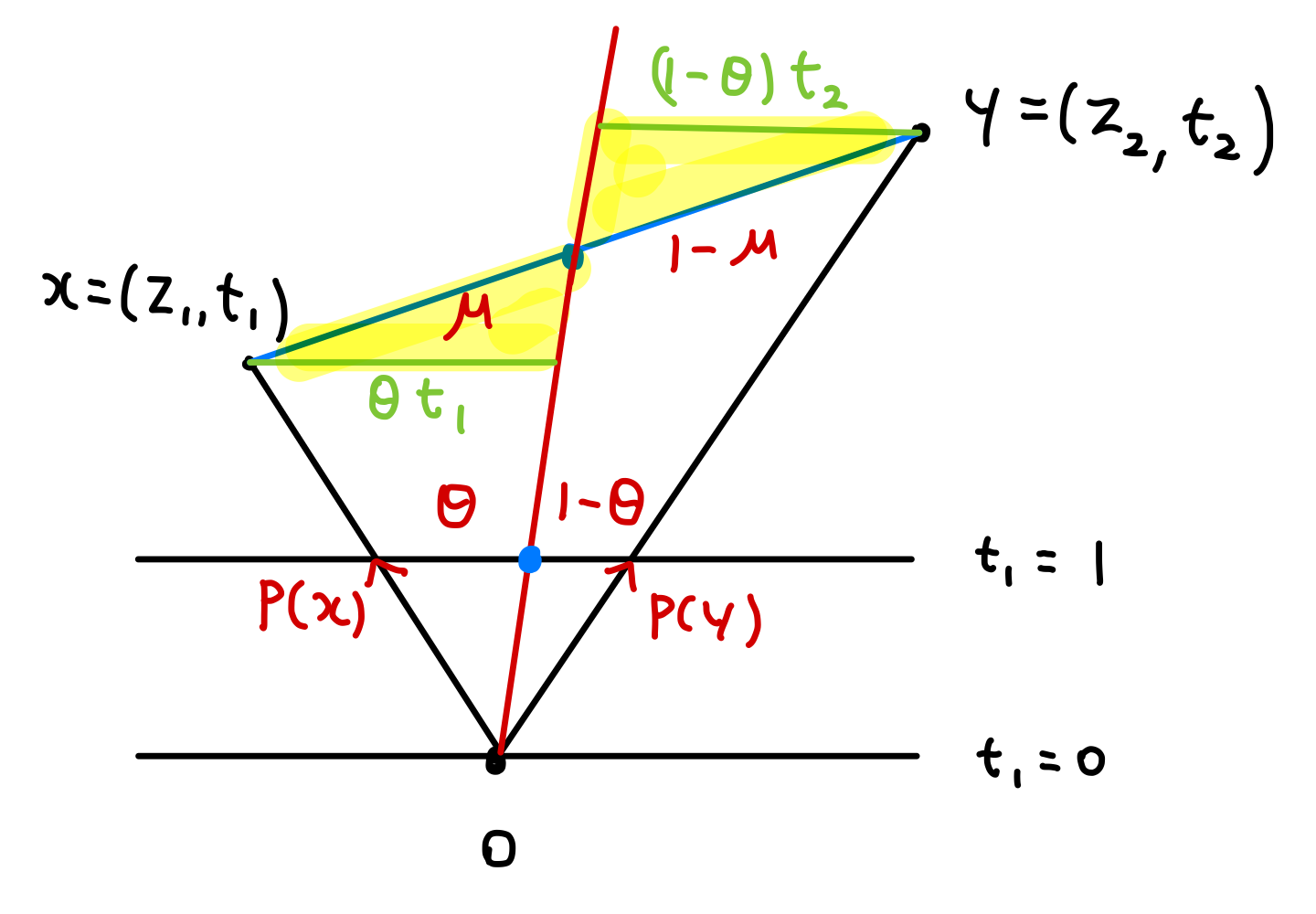
Define the perspective function P:Rn+1→Rn, with domain dom P=Rn×R++, as
P(z,t)=z/t
where R++ denotes the set of positive numbers. The perspective function scales or normalizes vectors so the last component is one, and then drops the last component.
💡
Since we eliminate the case when t=0, we don’t have to worry about that.
If C⊂dom P is convex, then its image
P(C)={P(x)∣x∈C}
is convex.
Proof
Let x,y∈P(C),θ≥0. Then there exists z1,z2∈Rn,t1,t2∈R such that
We can interpret the relation between μ and θ like this. Since two triangulars are similar,
μ:(1−μ)=θt1:(1−θ)t2
By using this, we can easily derive
μ=θt1+(1−θ)t2θt1
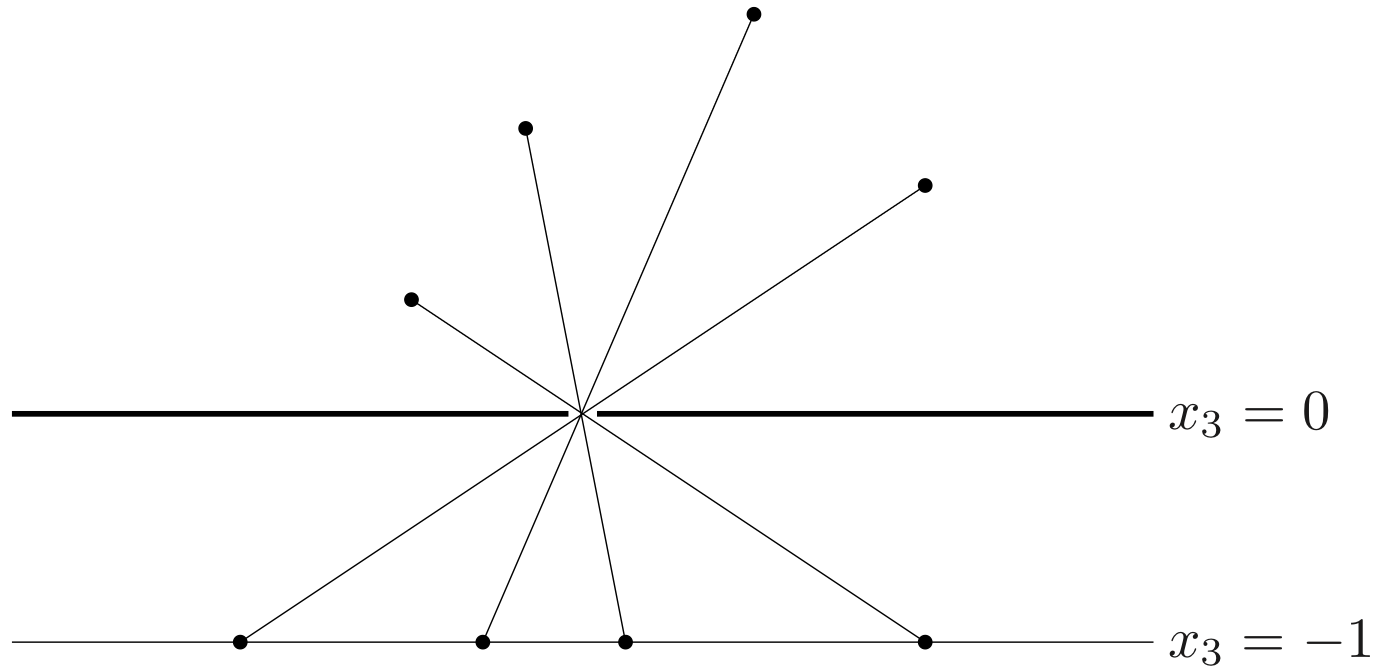
We can also show that the line segments are mapped to line segments under the perspective function. The result can be interpreted as a concept of a pin-hole camera.
The inverse image of a convex set under the perspective function is also convex.
If C⊂Rn is convex, then
P−1(C)={(x,t)∈Rn+1∣x/t∈C,t>0}
is convex.
Proof
Let (x1,t1),(x2,t2)∈P−1(C),θ≥0.
We want to show that θ(x1,t1)+(1−θ)(x2,t2)∈P−1(C), i.e.
A linear-fractional function is formed by composing the perspective function with an affine function. Suppose g:Rn→Rm+1 is affine, i.e.
g(x)=[AcT]x+[bd]
where A∈Rm×n,b∈Rm,c∈Rn, and d∈R. The function f:Rn→Rm given by f=P∘g such that
f(X)=cTx+dAx+b
where dom f={x∣cTx+d>0}
is called a linear-functional (or projective) function. If c=0 and d>0, the domain of f is Rn, and f is an affine function.
💡
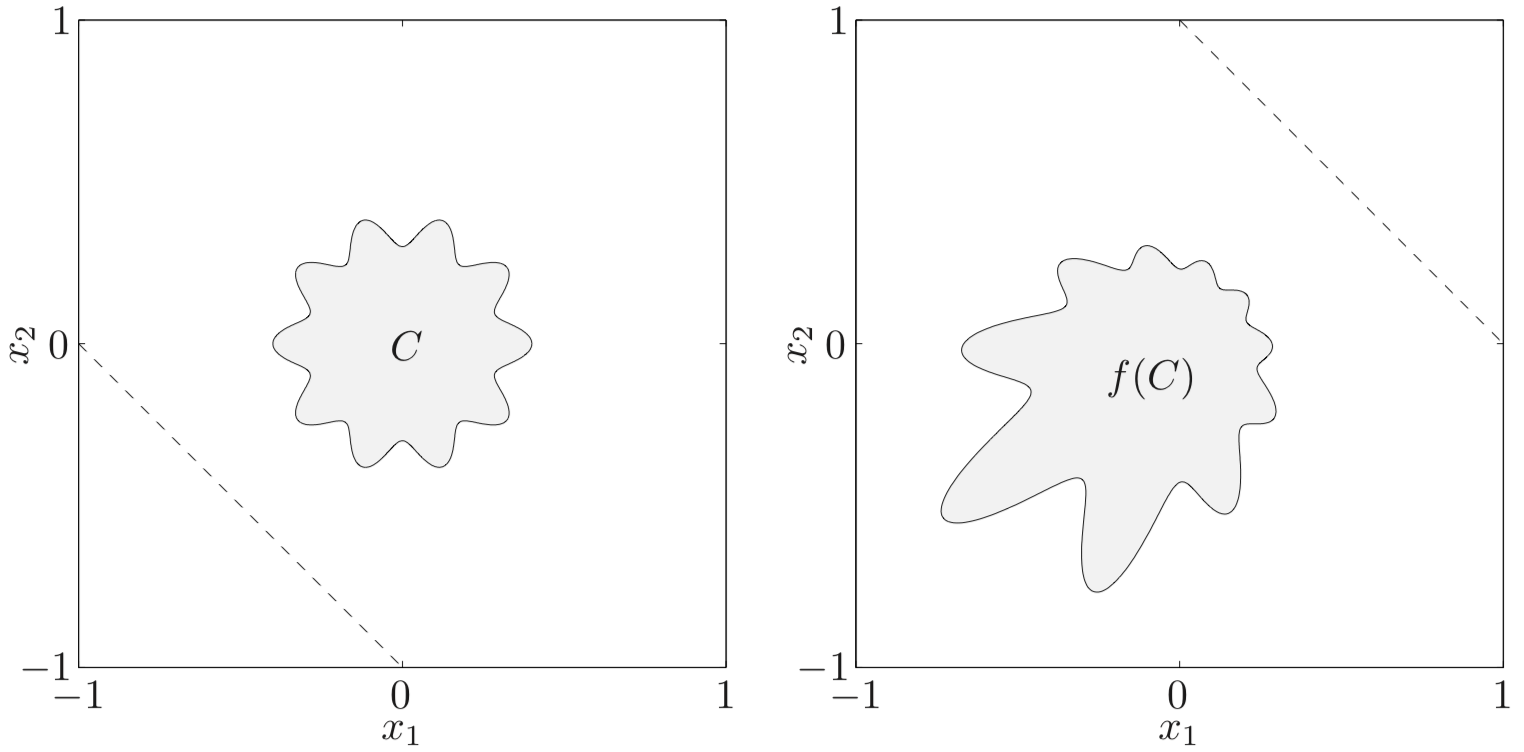
Images and inverse images of convex sets under linear-fractional functions is a convex set.
Example
f(x)=x1+x2+11x
Generalized inequalities
Proper cones and generalized inequalities
A cone K⊂Rn is called a proper cone if it satisfies the following
K is convex
K is closed
K is solid (it has nonempty interior)
K is pointed, which means that it contains no line (or equivalently, x∈K,−x∈K⇒x=0)
Examples
nonnegative orthant K=R+n={x∈Rn∣xi≥0,i=1,…,n}
positive semidefinite cone K=S+n
nonnegative polynomials on [0,1]
K={x∈Rn∣x1+x2t+x3t2+⋯+xntn−1≥0 for t∈[0,1]}
A proper cone K can be used to define generalized inequality, which is a partial ordering on Rn that has may of the properties of the standard ordering on R defined by
x⪯Ky⇔y−x∈Kx≺Ky⇔y−x∈int K
Actually, we have to check whether the above definition satisfy the following conditions
For all a,b,c∈Rn,
Partial orders
Reflexivity : a≤a (every element is related to itself)
Antisymmetry : if a≤b and b≤a then a=b (no two distinct elements precede each other)
Transitivity : if a≤b and b≤c then a≤c
Strict partial orders
Ir-reflexivity : not a<a (no element is related to itself)
Asymmetry : if a<b then not b<a
Transitivity : if a≤b and b≤c then a≤c
Examples
component-wise inequality (K=R+n)
x⪯R+ny⇔xi≤yi,i=1,…,n
matrix inequality (K=S+n)
X⪯S+nY⇔Y−X positive semi-definite
💡
these two types are so common that we normally drop the subscript in ⪯K
💡
These are not total ordering (i.e. there are some elements that are not comparable by using this order relation)
Properties
many properties of ⪯K are similar to ≤ on R
⪯K is preserved under addition
x⪯Ky,u⪯Kv⇒x+u⪯Ky+v
Proof
y−x∈K and v−u∈K. Since K is a proper cone,
(y−x)+(v−u)∈K⇒y+v−(x+u)∈K (associative in Rn)⇒x+u⪯Ky+v
⪯K is preserved under non-negative scaling
x⪯Ky,α≥0⇒αx⪯Kαy
Proof
y−x∈K. Since α>0α>0K is a proper cone,
α(y−x)∈K⇒αy−αx∈K⇒αx⪯Kαy
⪯K is preserved under limits
If xi⪯Kyi for i=1,2,… and xi→x and yi→y as i→∞, then x⪯Ky
Proof
yi−xi∈K,∀i and yi−xi→y−x as i→∞
Since K is closed (it contains all of its limit points),
y−x∈K
Therefore, x⪯Ky
Minimum and minimal elements
A point x∈S is the minimum element of S with respect to ⪯K if
∀y∈S,x⪯Ky
If a set has a minimum element, then it is unique.
Proof
Let x and y are minimum element of S. Then,
∀z∈S,z⪯Kx∀z∈S,z⪯Ky
Therefore,
y⪯Kx and x⪯Ky
By anti-symmetry,
x=y
Therefore, it is unique.
A point x∈S is the minimal element of S, if
∄y∈S,y⪯Kx and x=y
💡
If a set X has a minimum element, then all elements in X are comparable with respect to ⪯K.
Example
When K=R+2,
x1 is the minimum element of S1
x2 is a minimal element of S2 since the yellow regions are not comparable to x2.
Separating hyperplane
If C and D are disjoint convex sets, then there exists a=0,b such that
∀x∈C,aTx≤b∀x∈D,aTx≥b
the hyperplane {x∣aTx=b} separates C and D
strict separation requires additional assumptions (e.g. C is closed, D is a singleton)
Supporting hyperplane theorem
supporting hyperplane to set C at boundary point x0:
{x∣aTx=aTx0}
where a=0,∀x∈C,aTx≤aTx0
supporting hyperplane theorem : if C is convex, then there exists a supporting hyperplane at every boundary point of C
💡
Note that the normal vector a directs to the opposite side of the C
Dual cones and generalized inequalities
Let K be a cone. The set
K∗={y∣yTx≥0,∀x∈K}
is called the dual cone of K. As the name suggests, K∗ is a cone, and is always convex, even when the original cone K is not.
Proof
Let y1,y2∈K∗,θ≥0.
Therefore, y1Tx≥0 and y2Tx≥0 for all x∈K
We want to show that θy1+(1−θ)y2∈K∗ i.e.
(θy1+(1−θ)y2)Tx≥0,∀x∈K⇔θy1Tx+(1−θ)y2Tx≥0,∀x∈K
Since y1Tx≥0 and y2Tx≥0 for all x∈K,
θy1Tx+(1−θ)y2Tx≥0
So, θy1+(1−θ)y2∈K∗
Therefore, K∗ is a convex set.
💡
There is no requirement of convexity of K
Geometrically, y∈K∗ if and only if −y is the normal of a hyperplane that supports K at the origin.
Examples
K=R+n,K∗=R+n
Dual of a norm cone. Let ∥⋅∥ be a norm on Rn. The dual of the associated cone K={(x,t)∈Rn+1∣∥x∥≤t} is the cone defined by the dual norm
K∗={(u,v)∈Rn+1∣∥u∥∗≤v}
where the dual norm is given by ∥u∥∗=sup{uTx∣∥x∥≤1}
If the closure of K is pointed then K∗ has non-empty interior.
K∗∗ is the closure of the convex hull of K (Hence if K is convex and closed, K∗∗=K)
💡
These properties show that if K is a proper cone, then so is its dual K∗, and moreover, that K∗∗=K
Dual generalized inequalities
Suppose that the convex cone K is proper, it induces a generalized inequality ⪯K. Then its dual cone K∗ is also proper, and therefore, induces a generalized inequality.
y⪰K∗0⇔yTx≥0,∀x⪰K0
Example : positive semi-definite cone
On the set of symmetric n×n matrices Sn, we use the standard inner proudct tr(XY)=∑i,jXijYij. The positive semi-definite cone S+n is self-dual. i.e. for X,Y∈Sn
tr(XY)≥0,∀X⪰0⇔Y⪰0
Proof
Suppose Y∈/S+n. Then there exists y∈Rn with
qTYq=tr(qqTY)<0
Since X=qqT is a positive semi-definite matrix, Y∈/(S+n)∗
Now suppose X,Y∈S+n. We can express X as a linear combination of rank-one matrix by using eigenvalue decomposition.
Minimum and minimal elements via dual inequalities
We can use dual generalized inequalities to characterize minimum and minimal elements of a set S⊂Rn with respect to the generalized inequality induced by a proper cone K
Minimum element w.r.t ⪯K
x is a minimum element of S if and only if for all λ≻K∗0, x is the unique minimizer of λTz over z∈S. Geometrically, this means that for any λ≻K∗0, the hyperplane
{z∣λT(z−x)=0}
is a strict supporting hyperplane to S at x. Equivalently, this means that the hyperplane intersects S only at the point x
💡
We can think the level surface which has a normal vector as a λ
Minimal element w.r.t ⪯K
If x minimizes λTz over S for some λ≻K∗0, then x is minimal
💡
We only consider the specific λ∈K∗. It basically related to the supporting hyperplane.
If x is a minimal element of a convex set S, then there exists a nonzero λ⪰K∗0 such that x minimizes λTz over S.
💡
Justification of finding the supporting hyperplane for all point in the convex set.
If S is not a convex, we can’t guarantee that there exists such λ
In this case, x is a minimal point of S with respect to R+2. However, there doesn’t exist λ for which x minimizes λTz over z∈S






 https://en.wikipedia.org/wiki/Simplex
https://en.wikipedia.org/wiki/Simplex