Computer Science/Optimization
11. Penalty and Barrier Methods
- -
728x90
반응형
Introduction
In the last article, we discussed the use of feasible-point methods for solving constrained optimization problems. These methods are based on minimizing the Lagrangian function while attempting to attain and maintain feasibility. When inequality constraints are present, these methods solve a sequence of subproblems with a changing active set until a solution to the original constrained problem is found.
However, there are some major disadvantages to this approach.
- As the number of constraints increases, the number of potential subproblems.
- The idea of keeping the constraints satisfied exactly, although easily achieved in the case of linear constraints, is much more difficult to accomplish in the case of nonlinear constraints.
Some of these disadvantages can be removed by using penalization methods. These methods solve a constrained optimization problem by solving a sequence of unconstrained optimization problems. The hope is that in the limit, the solutions of the unconstrained problems will converge to the solution of the constrained problem.
In contrast to active-set methods, this approach takes into account all constraints, and thus the difficulties of guessing a correct active set are avoided. Further, since penalization techniques don’t attempt to keep the constraints satisfied exactly, they can be more suitable for handling non-linear constraints.
Although penalization methods ameliorate some of the difficulties, they introduce difficulties of their own. In particular, it can give rise to ill-conditioning problems.
Classical Penalty and Barrier Methods
The general class of penalization methods includes two groups of methods:
- penalty methods: imposes a penalty for
violatinga constraint
- barrier methods: imposes a penalty for
reaching the boundaryof an inequality constraint
Suppose that our problem is given in the form:
where is the set of feasible points.
Define
The function can be considered as an infinite penalty for violating feasibility. Hence the constrained problem can be transformed into an equivalent unconstrained problem in the form:
💡
즉, violating constraint하는 영역에 대해 함숫값을 무한대로 만들어버림으로써 간접적으로 이를 해결하는 것으로 기하학적인 이해를 할 수 있다.
However, this is not a practical idea, since the objective function of the unconstrained minimization is not defined outside the feasible region. Moreover, it makes a discontinuities within the boundaries.
Therefore, barrier and penalty methods solve a sequence of unconstrained subproblems that are more manageable, and that gradually approximate the infinite penalty function.
Barrier Methods
Consider the nonlinear inequality constrained problem
Barrier methods use a barrier term that approaches the infinite penalty function . Let be a function that is continuous on the interior of the feasible set, and that becomes unbounded as the boundary of the set is approached from its interior:
There are two examples:
- Logarithmic function
- Inverse function
Now let be a positive scalar. Then will approach as approaches zero.
By adding a barrier term of the form to the objective, we obtain a barrier function
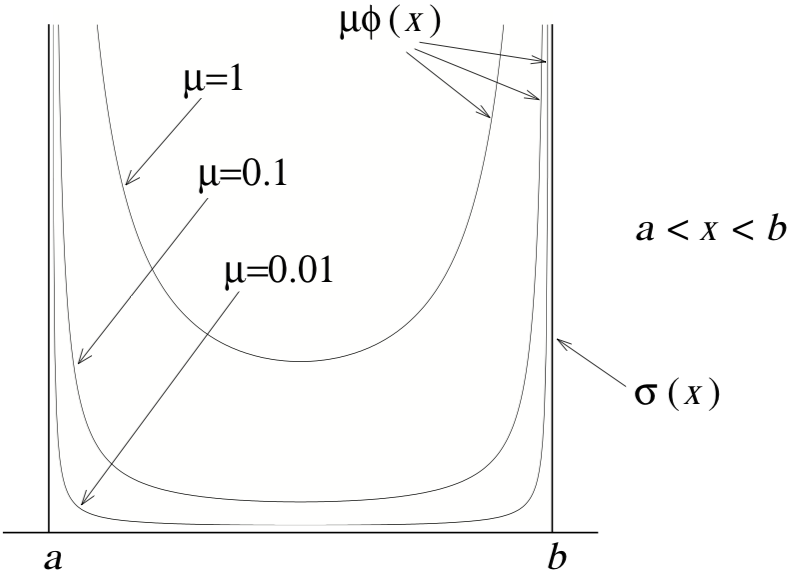
where is referred to as the barrier parameter
Barrier methods solve a sequence of unconstrained minimization problem of the form
for a sequence of positive barrier parameters that decrease monotonically to zero.
💡
계속해서 barrier parameter를 줄이는 이유는 effect of the barrier term를 줄이기 위함이다. 이를 통해 점진적으로 boundary에 존재하는 feasible region에 접근할 수 있도록 한다.
Why solve a sequence of problems? The reason is that when the barrier parameter is small, the discontinuous at and makes a problem. For this reason we start with larger values of the barrier parameter. If is decreased gradually, and if the solution of one unconstrained problem is used as the starting point of the next problem, these unconstrained minimization problems tend to be much easier to solve.
💡
objective function의 minimum value가 가 작아짐에 따라서 작아진다. 특정 임계점 이하로 변동하게 될 경우 의 update를 멈추면 된다.
Penalty Methods
In contrast to barrier methods, penalty methods solve a sequence of unconstrained optimization problems whose solution is usually infeasible to the original constrained problem.
An advantage of penalty methods is that they don’t require the iterates to be strictly feasible. Thus, unlike barrier methods, they are suitable for problems with equality constraints.
💡
Equality constraint의 경우에는 barrier method로 풀기에 적합하지는 않다. 잘 생각해보면 해당 constraint를 제외하고는 무한대로 설정되기 때문이다.
Consider the equality constraint problem
where is a -dimensional vector whose ’th component is
The penalty for constraint violation will be a continuous function
There are two examples:
- loss function
- Another penalty funciton
where
The weight of the penalty is controlled by a positive penalty parameter . As increases, the function approaches to . We can define the penalty function as follows
The penalty method consists of solving a sequence of unconstrained minimization problems of the form
for an increasing sequence of positive values tending to infinity.
💡
More convenient than barrier methods since there is no need of an initial feasible point.
However, it also has a problem
- same numerical issue as for barrier method when is increased.
- may be undefined for infeasible point (e.g. square root of a negative number)
What about inequality problem? Think about this case
In this case, we can use the penalty function by using
If
, the penalty value is 0.
However, if
, the penalty value is greater than 0.
💡
Check : 2106 7th problem
반응형
Contents
소중한 공감 감사합니다